

D3P-600-P3 Delta Robota
Produktuaren Ezaugarria
Ezaugarria
1、Zikloaren denbora estandarra 0,5 s baino txikiagoa da, abiadura maximoa eta gutxieneko bolumena lortzeko zure bila.
2 、 Hooke junturaren diseinu aurreratuak biraketa ardatzean, robotari intentsitate handiko eragiketa errepikakorrari erraz aurre egiteko aukera ematen du.
3、Robota espazio estuko operazioetarako aproposa da, baita abiadura handiko eta doitasun handiko 3C eremuan ere.Oso erabilia pieza txikien muntaketa, manipulazioa eta probak egiteko.
Produktuaren Parametroak
| Mota | D3P-600-P3 | |
| Ardatzak | 3+1 | |
| Karga erabilgarria | 3kg | |
| Manipulatzailea | Pisua | 66 kg |
| Diametroa | 600 mm | |
| Errepikagarritasuna | Posizioa | 0,05 mm |
| Errotazioa | 0,1° | |
| Gehienezko Abiadura | 500 pp/min | |
| Errotazio-eremua | ±360 | |
| Onartutako Gehienezko Inertzia Momentua | 31 × 10-4kg .m2 | |
| Aktuatutako besoaren angelu-sorta | Gora | 36,5º |
| Behera | 65,5º | |
| Energia hornidura | 380 VAC trifasikoa -% 10 ~ + % 10, 49 ~ 61 HZ | |
| Potentzia Edukiera | 3KVA | |
| Potentzia nominala | 1,3kw | |
| Biltegiratze Tenperatura | -10 ℃ ~ 70 ℃ | |
| Lan-ingurunea | -10℃~50℃,RH≤80% | |
| Babes | IP55 | |
Produktuaren marrazkia
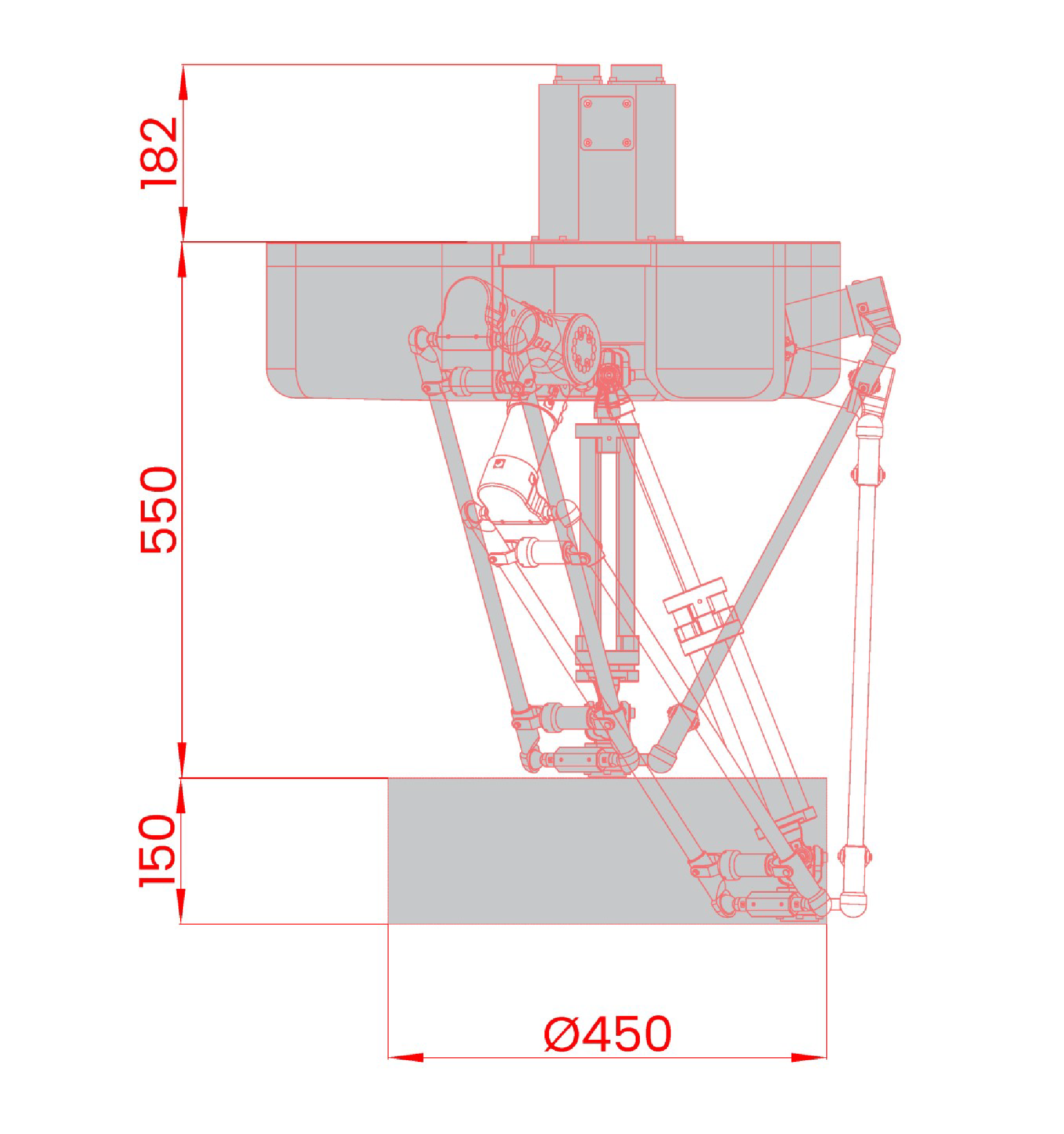
01.Dimentsioak eta lan-eremua (mm)
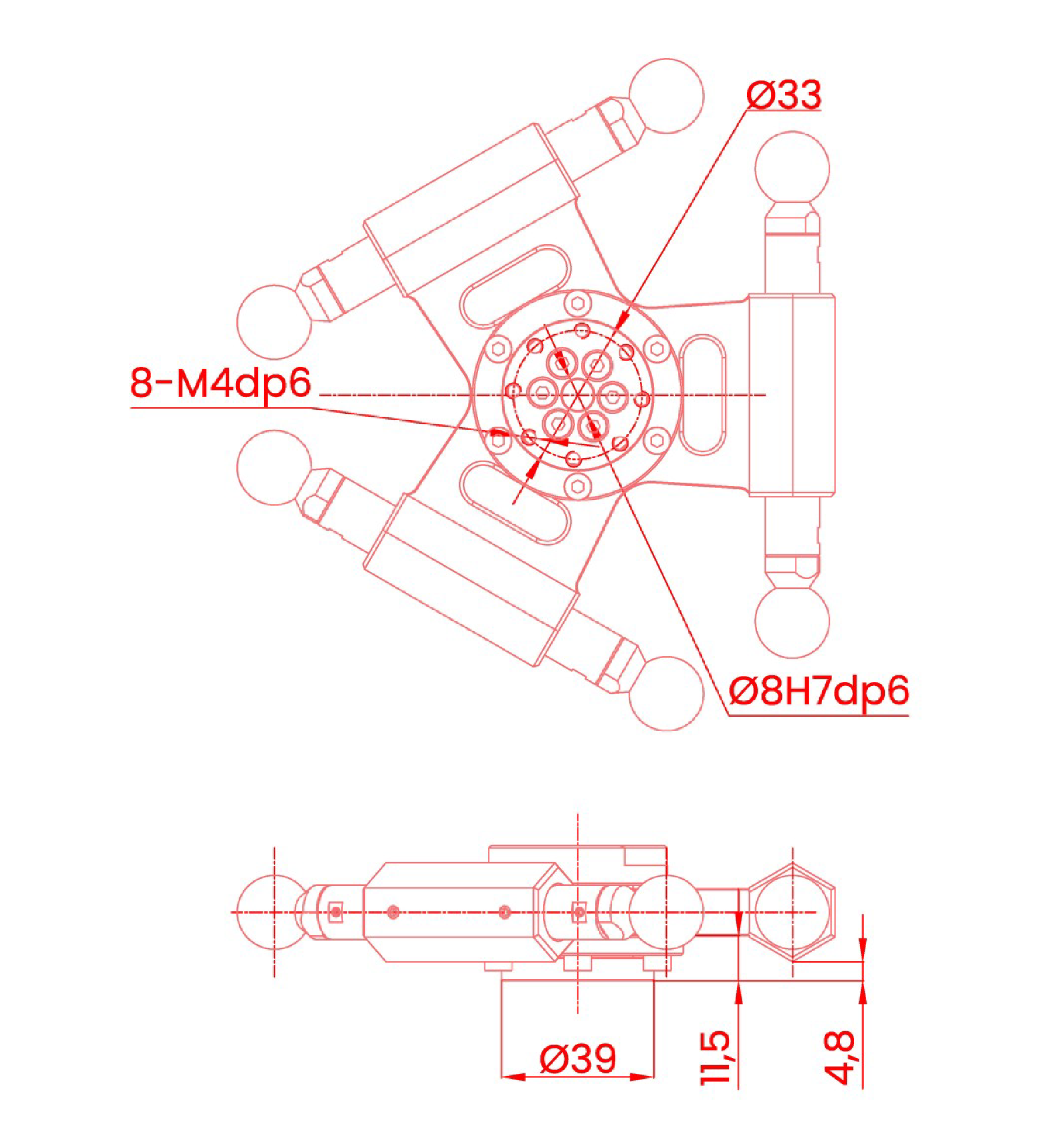
02. Brida (mm)
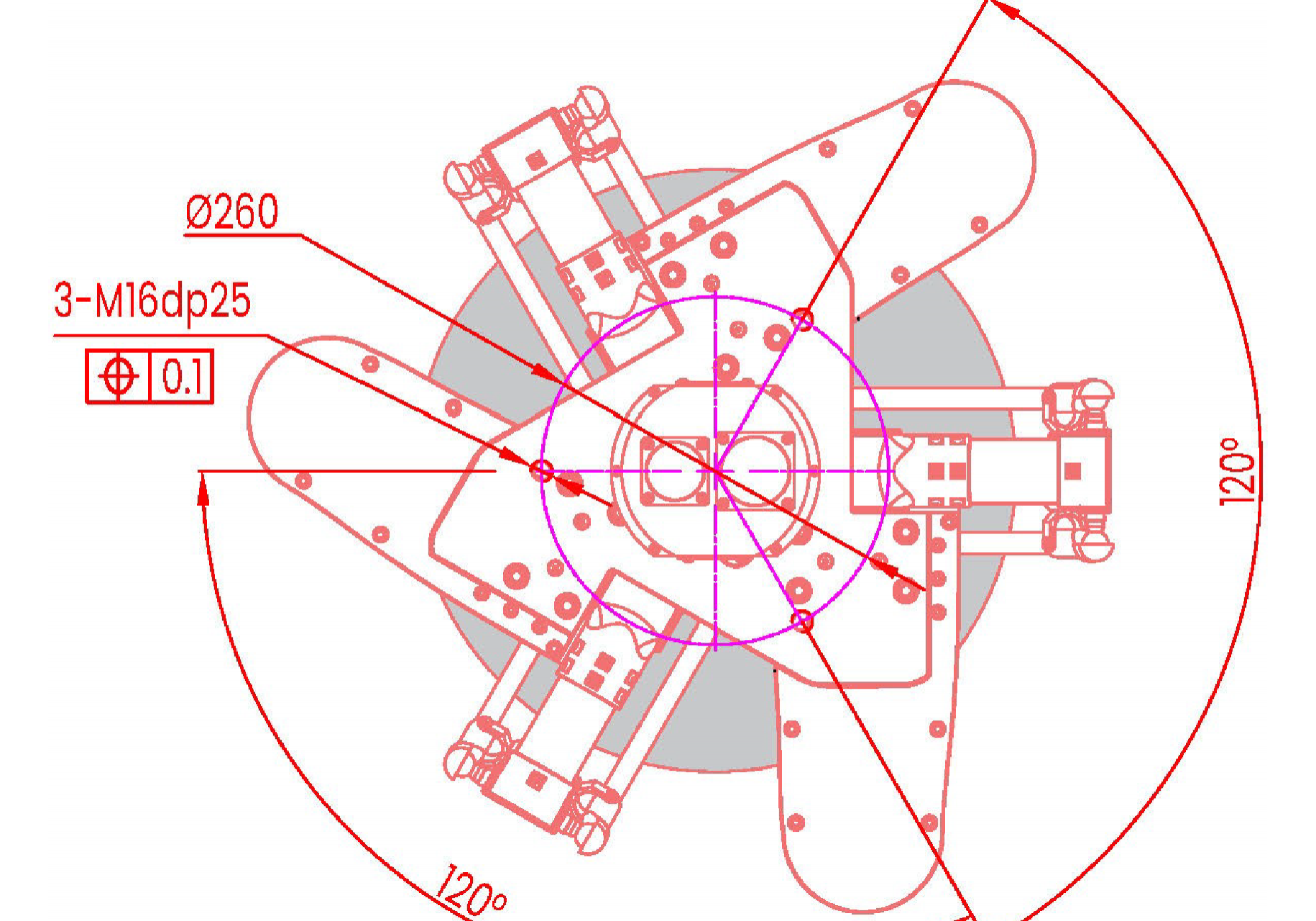
03.Oinarrizko instalazioa (mm)
Idatzi zure mezua hemen eta bidali iezaguzu





